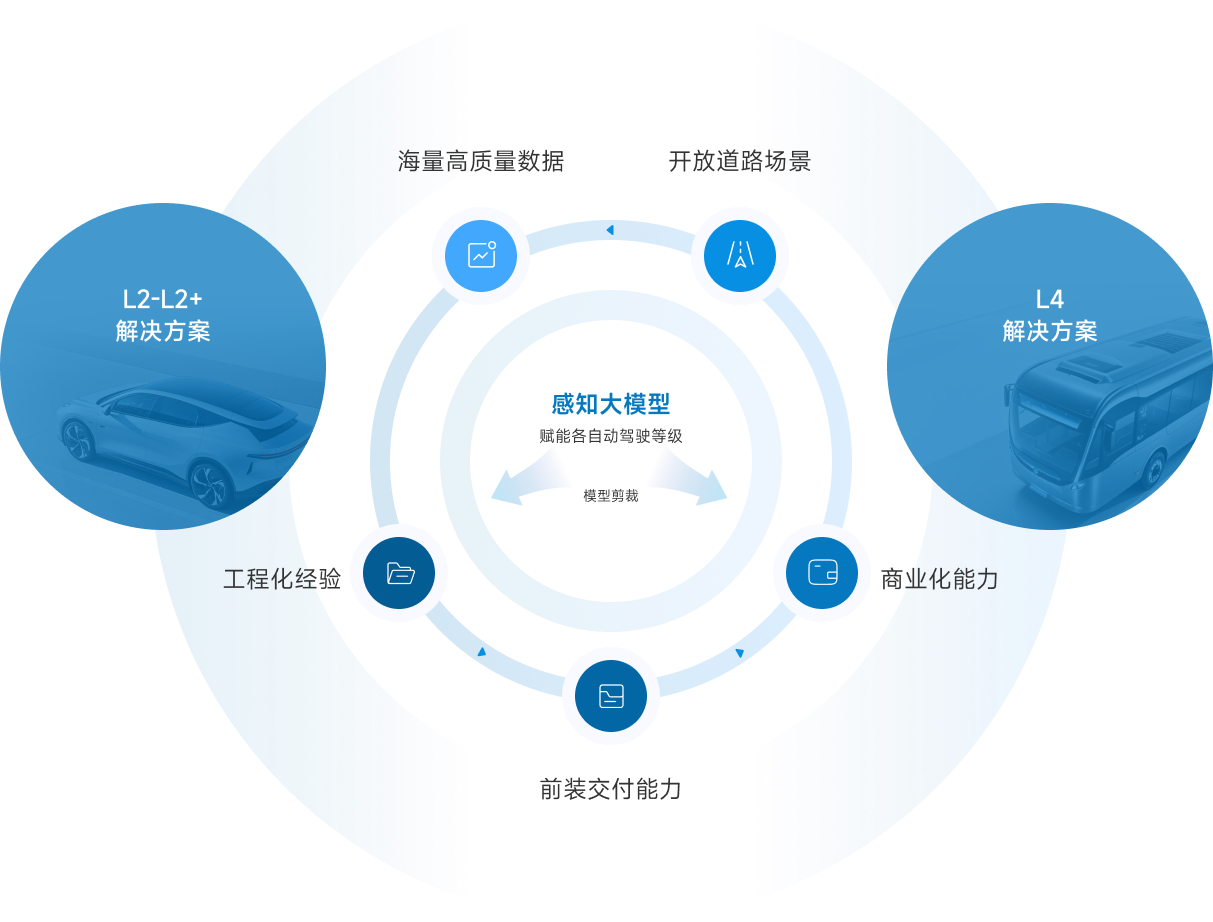
在软件开发方面,我们通过复用L2-L2+级解决方案的技术栈、开发平台与工具链,显著提升了我们在L4级解决方案的研发效率并有效降低了开发成本。无论是面向L2-L2+级还是L4级解决方案的AI模型,我们始终基于统一的基础模型进行构建,并根据应用场景和性能需求,通过模型剪枝、量化、蒸馏等技术对其进行优化与定制,确保了技术开发的一致性与高效性。
我们在L2-L2+级量产项目交付中积累了丰富的AI技术和工程化经验。L2-L2+级解决方案在可靠性与稳定性上已获量产项目充分印证,从而为L4系统的开发与部署提供了可复制的工程基础。
在硬件方面,通过复用L2-L2+级解决方案中采用的传感器与域控制器,不仅保证硬件的可靠性,还凭借量产供应链的成本优势,降低我们L4级解决方案的成本。我们在L2-L2+级解决方案中积累的算法性能优化经验,也帮助我们优化我们L4级解决方案中的传感器布局与芯片选型。例如,我们Robotaxi方案ConnectOne的传感器布局就采用了更少的激光雷达,并主要使用具备中阶算力的地平线征程6处理硬件,明显提高了我们L4级解决方案的性价比。
随着我们L4级解决方案部署规模的逐渐扩大,我们也能够在实际运营场景中积累海量高质量数据。这些来自L4级车辆的高质量数据能够用于反哺我们在L2-L2+级解决方案中的模型优化。与传统依赖人类驾驶员采集数据相比,这些经匿名化与清洗处理后的真值数据不仅消除了人为驾驶行为带来的固有偏差,更能加快我们的产品迭代周期并同时降低我们的数据采集成本。这样的双轨并进路径,帮助我们形成良性的数据闭环,并巩固了我们的智能驾驶系统性能上的竞争优势,也为L2-L2+级及L4级解决方案构建了协同互补、互促共进的发展范式。
凭借强大的软硬件协同开发能力,我们构建了适配多芯片平台的统一异构计算开发架构,以实现AI算法模型及各类硬件(如算力芯片、传感器)的深度适配,我 们采用统一的平台接口和数据协议的系统架构,并通过自动化模型转换工具,支持智驾系统在不同芯片平台的快速部署与验证。同时,我们通过分层解耦的系统 架构设计,实现系统平台对外接口的统一和标准化,有效打破不同硬件之间的壁垒,确保系统在芯片平台上实现一致的卓越表现,实现软件的通用性和可复用性,支持智驾系统的跨平台快速部署与验证。

快速适配新规则和区域
全面覆盖多种极端场景

物体识别、联合推理
行为理解能力领先

减少大规模真实样本依赖
我们通过端到端方法与大语言模型的深度融合构建VLA/VLM架构,实现领先的物体识别、精准的交通参与者行为意图预测及全面的环境理解。我们通过自然语言驱动的轨迹生成器,强化AI系统的可解释性,提升用户与监管层的信任度。通过多模态融合与冗余安全机制,我们的系统具有极高的鲁棒性。我们的系统架构可弥补独立端到端系统在极端条件下的局限性,减少误检,并通过具备高泛化能力的AI模型优化长尾问题处理能力。我们秉持开发具有更高推理效率的轻量级AI模型的理念,结合模型修剪、量化及蒸馏方法压缩模型参数量,并借助对各类不同芯片平台的深度认知,实行多核并行调度机制,在CPU与NPU协同架构的芯片下实现异构算力的最大化利用。
端到端 · 无图 · 点到点
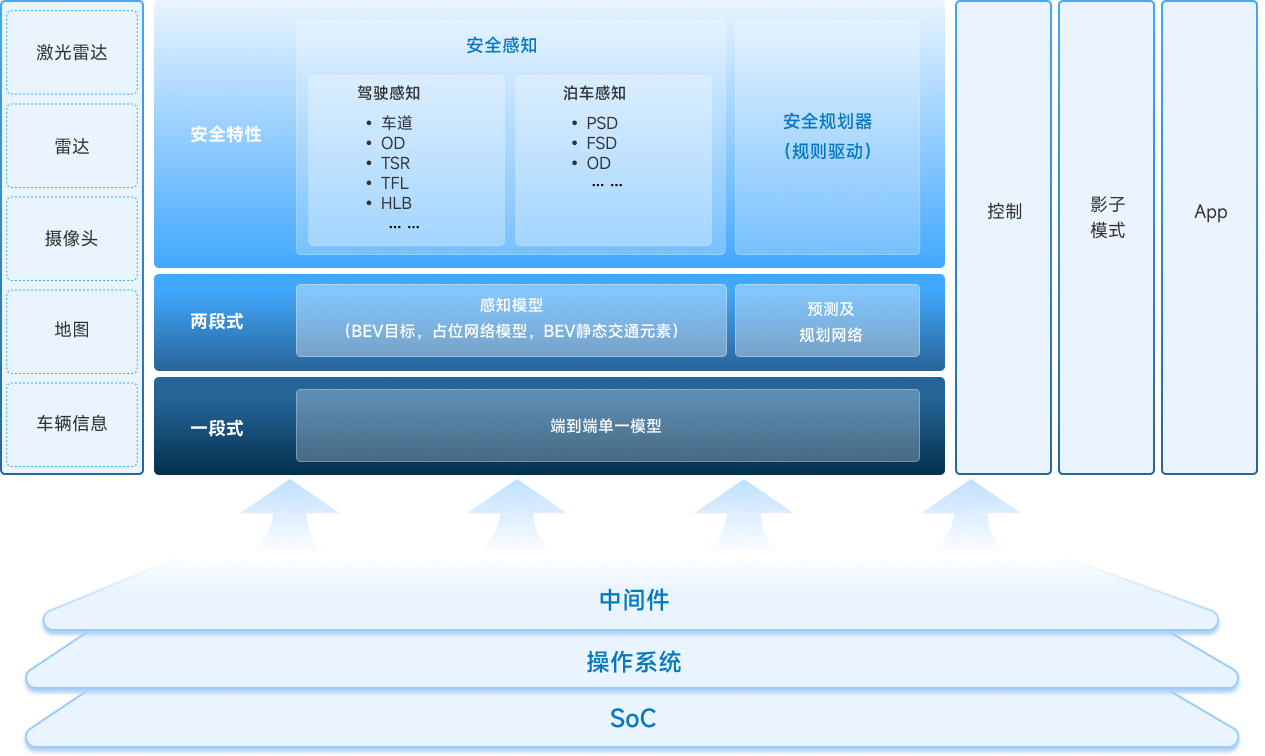
通过集成多个AI感知算法模型、感知后融合模型以及基于规则的规划与控制模块,形成一套稳定可靠的智能驾驶解决方案。该系统功能模块清晰,可解释性强,但需要针对各种场景开发规则和兜底方案,模块间交付关系复杂,应对长尾问题解决能力有限。这是智能驾驶行业早期主流技术方案。
该系统采用基于BEV视角的前融合感知算法,将其他传感器点云数据与视觉共同融合,再通过在同一规划模块中结合规则规划策略及模型规划解决跨模态空间匹配问题。该系统提升了时序建模能力,并降低漏检误检率,显著增强了系统在复杂场景中的适应性与可靠性,成为近年量产项目中的主流技术方案。
该系统采用“感知模型+ 决策/规划模型” 构成两段式端到端架构。该系统通过大模型驱动感知模块以精准理解环境,以基于模型的规划模块承接感知结果,并输出控制指令,确保“感知-决策-规划”之间的无缝衔接,极大程度降低了系统的复杂性,优化了信息流动,减少了模块间的信息损失,提升了整体系统的效率与精准度。
实现了“感知与规划一体化端到端系统”,通过一个大模型从传感器数据输入开始,并输出控制指令。此架构进一步简化了系统结构,提升了模型执行效率与泛化能力,增强了系统的集成度与可操作性。此外,我们亦通过VLM/VLA等架构进一步增强系统的可解释性。
基于领先的强化学习(RL)和对比模仿学习(CIL)技术构建,能够像经验丰富的司机一样,在复杂多变的交通环境中实时做出安全、舒适和高效的行驶规划。通过强大的决策模型架构,提升了自动驾驶系统的智能化水平和应对复杂场景的能力。
数据收集 · 数据管理 · 数据回传
查看详情 >模型转换工具 · 自动化性能评估 · 软件库
查看详情 >算法组合 · 系统部署 · 测试验证
查看详情 >我们在CalmVolution平台中接入了多模态AI大模型,帮助我们在研发及交付过程中对客户需求进行分析、拆解和审阅,加快生成代码,并对代码进行质量评估。此策略亦可帮助我们清晰梳理需求、开发和测试验证之间的追溯关系,进一步提升我们的系统性纠错能力。
我们的数据闭环系统DataTurbo以“全链路数据闭环”为核心设计理念,通过数据采集、数据管理、数据回传三大模块的深度协同,构建 了从数据生成到价值转化的完整链路,为智驾算法迭代与功能优化的核心素材-“数据”的高效处理提供支撑。
我们的模型训练与开发系统CalmForge可以帮助我们实现各类 AI算法模型在包括训练,调优,评估,以及监控等涵盖模型生命周期各个阶段的管理。通过优化训练方法,CalmForge基于分布式理念帮助我们同时针对多个不同模型进行独立训练和高效迭代,提升我们的AI训练服务器的有效利用率,让我们的模型训练周期相较于较常规方式可以缩短30%以 上。此外,集成在CalmForge内的模型转换工具也可以帮助我们将AI模型自动转化成适配其他芯片平台的模型,进一步提升我们的对不同芯片平台的适配性,减少我们的研发成本。
我们的CalmVergence自动化系统集成平台通过精确构建算法、软件与硬件之间的无缝联动成为我们实现智能驾驶系统快速部署的核心支撑系统。该系统支持研发团队仅仅通过轻松勾选的方式,便能将我们AI算法模型及软件库中的软件与各类车辆接口的无缝移植及集成,最大限度帮助我们实现研发成果的复用。这使得我们的软件及AI算法模型在不同项目中的复用率超过70%以上。在面对一款新芯片平台,我们可以在一个月内完成完整系统的部署调通 ;而在已部署过的芯片平台上,针对新车型的量产项目从部署、测试验证到最终交付的全流程耗时不到六个月。
神经网络同时输出稀疏特征点云、稀疏语义目标、密集语义目标等多维度信息,地图信息空间分布涵盖地面和地上。解决了地图信息提取计算冗余高、信息含量少的问题。
结合环境丰富的语义、稀疏点云信息共同完成场景的匹配定位,解决了光照高动态、场景少纹理和场景重复纹理的定位问题,可实现跨层停车场景记忆地图中任意位置初始定位。
采用多摄冗余设计机制,解决遮挡场景的重定位难题,可实现一次性建图,双向巡航定位功能以满足各种停车、取车需求。
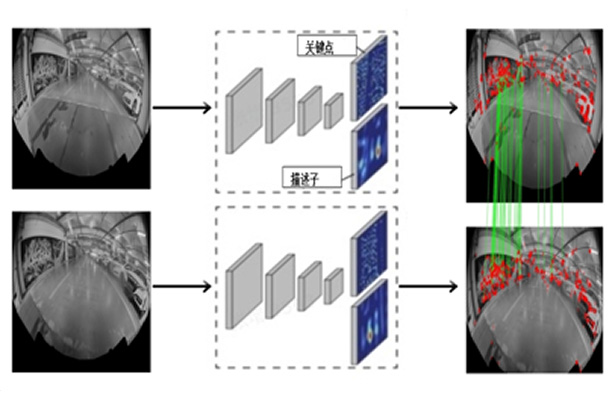

卷积神经网络特征提取与匹配
神经网络特征示例
跨层泊车
为最大化AI开发大平台的效能,我们围绕其各个核心子系统研发了一系列专用的工具链产品
进一步提升该平台在数据处理、模型训练、交付售后上的优势,以下摘录部分工具链产品的介绍
为更好地开展端到端模型训练,我们自主研发了4D自动标注工具Fast4D。 Fast4D在传统3D标注基础上引入时序维度,能够对动态目标的运动轨迹、形态变化及其与周边环境交互进行连续、一致的跟踪,有效保障数据中目标的时空一致性。我们的Fast4D采用增强型3D高斯溅射方法,重建效率较传统基于NeRF的方法提升16倍,通过对多传感器数据的融合处理,生成预标注4D数据,再经人工精修后即可形成用于AI模型训练的高质量数据集。与传统2D/3D标注模型相比,Fast4D将我们的数据标注效率提升约120倍。
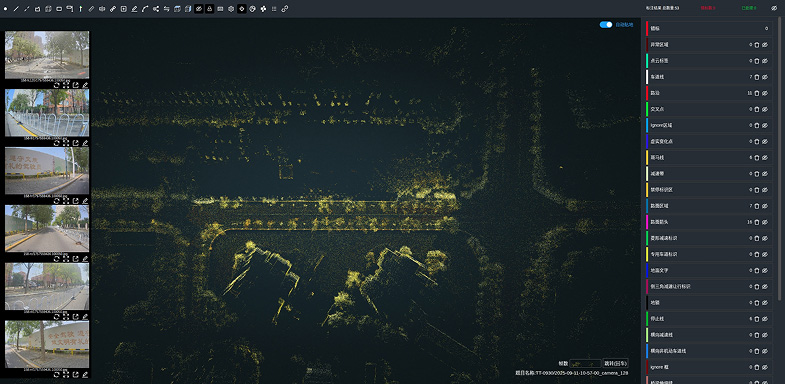
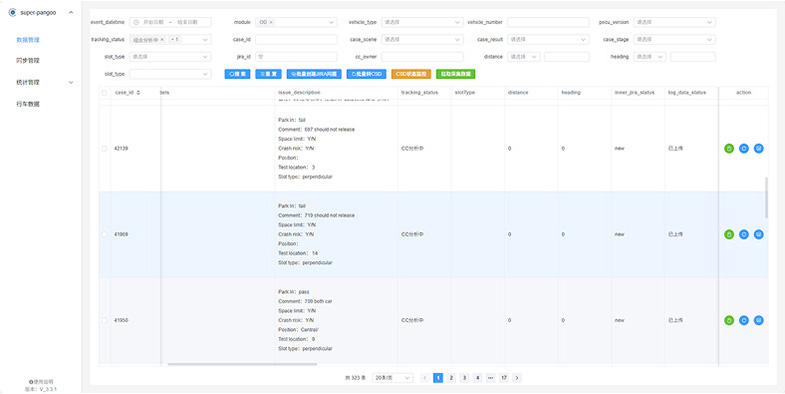
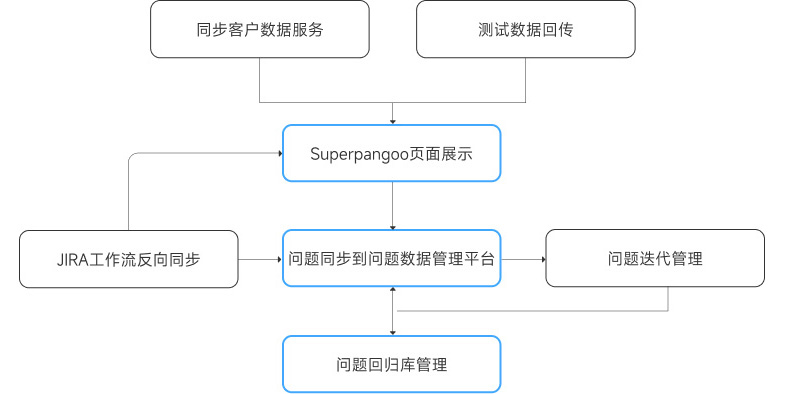
查看详情为了更好跟踪开发及交付的全流程,并为客户提供高品质和及时的响应服务,我们开发了SuperPangoo问题数据闭环管理平台。该平台支持问题快速录入、分配、处理与归档,并可与客户采用的各类主流工作流管理系统对接,确保客户问题在内部及外部均可追踪、可追溯。我们通过SuperPangoo实时同步问题处理进度与解决方案,自动回传关键信息至客户的内部管理平台,帮助客户及时掌握问题动态。SuperPangoo显著提升客户体验与满意度。
查看详情